松下伺服调试步骤
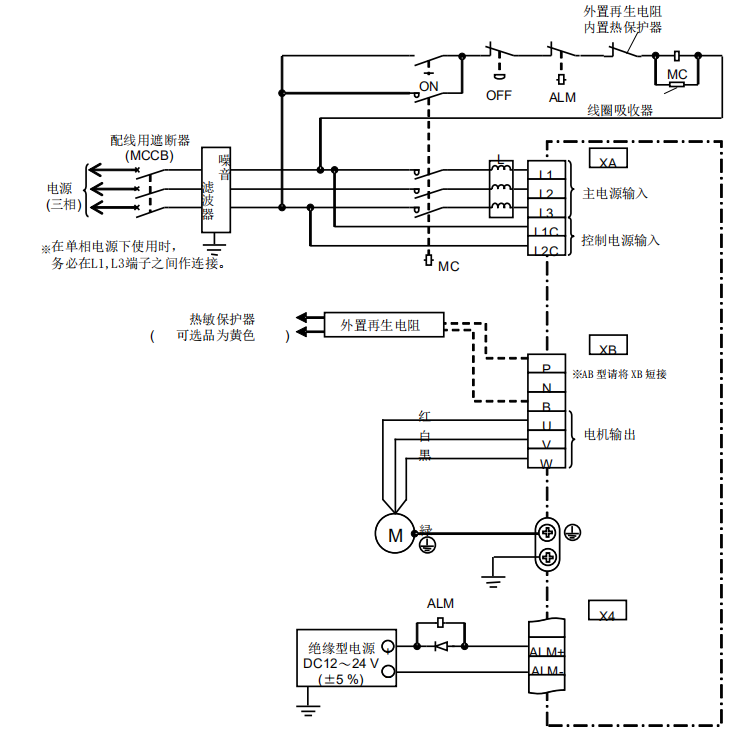
1、连接 驱动器主要有控制回路电源、主控制回路电源、控制器接口X4、外部位移传感器接口X5、编码器X6。
电源连接器及端子台的配线
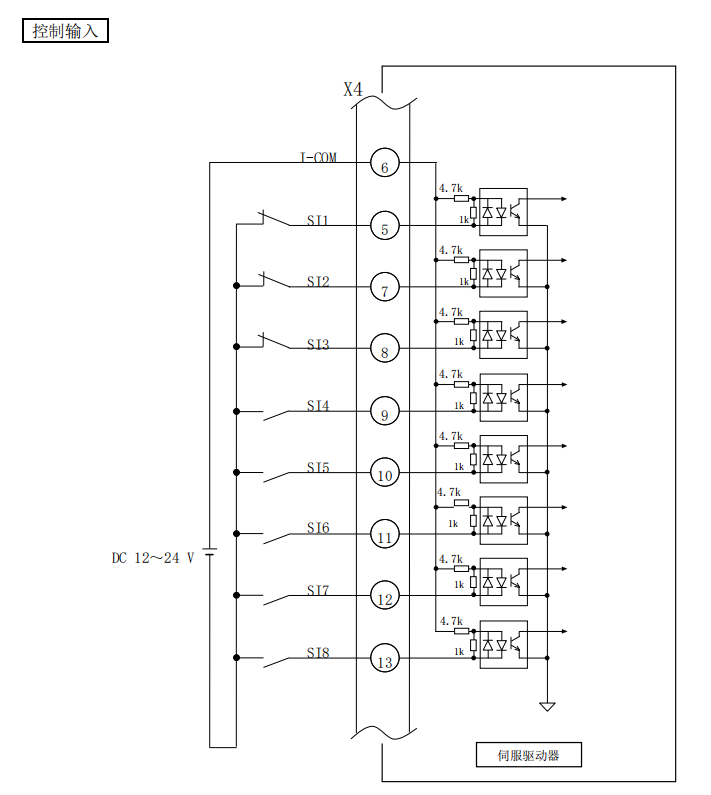
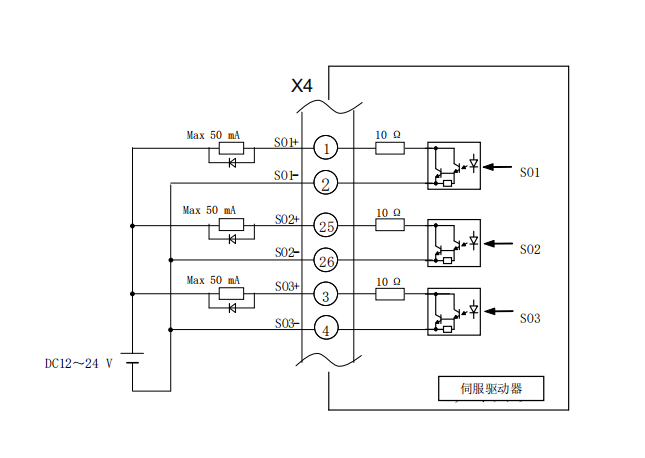
连接器 X4 的配线
控制输入
控制输出
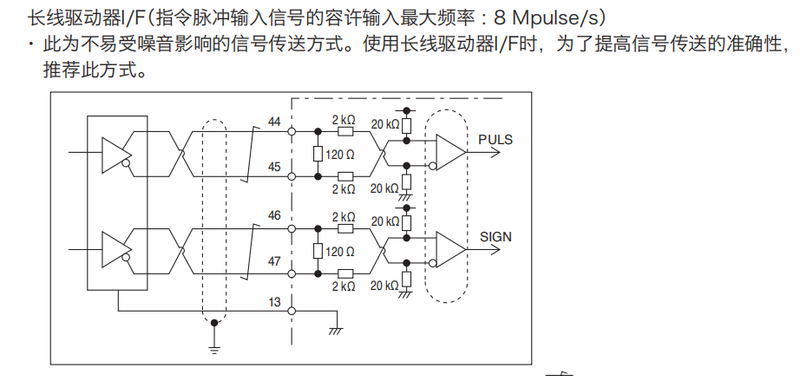
长线驱动器专用脉冲串接口
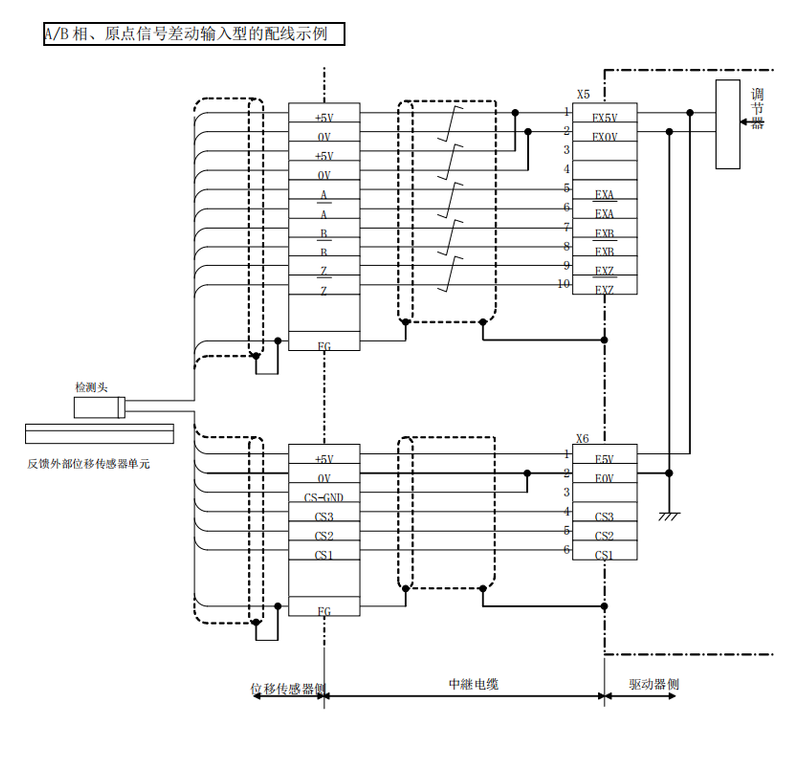
连接器 X5 X6 的配线
2、使用工具的直线电机自动设定
使用线性电机自动设定工具(MotorAutoSetup)后,可以自动进行与线性电机组合对应的 参数的初始设定(电流增益、光栅尺方向、CS方向)。(关于线性电机自动设定工具,请咨询松下电器。)
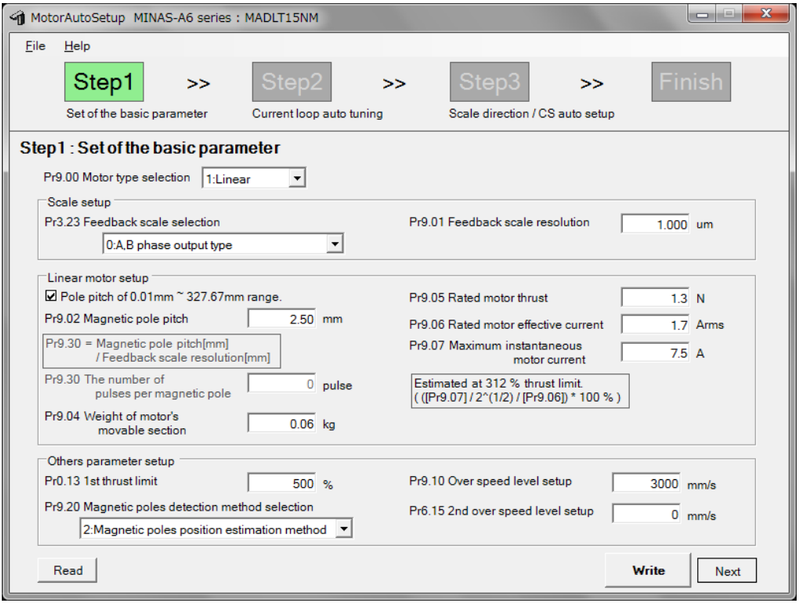
如果开始自动设定,伺服使能开启后会进行线性电机自动设定,因此线性电机会发生动作。自动设定完成后自动变为伺服使能关闭。
自动设定后请务必在最后复位伺服驱动器的电源。
(关于线性电机自动设定工具的使用方法,请参照工具附带的步骤书。)
3、设定方向及电子齿轮比
方向设定
相对于位置指令/速度指令/转矩指令的方向可以切换电机动作方向。
关联参数

・Pr0.00“动作方向设定”请按照下述步骤进行设定。
【步骤 1】
首先请先设定 Pr3.26“光栅尺方向反转”。
设定方法请参照 4-7-1-4 光栅尺的方向设定。
设定后请写入 EEPROM,再次接通电源。
【步骤 2】
请设定为 Pr0.00=1,写入 EEPROM 中,然后再次接通电源。
(出厂设定为 Pr0.00=1,如果处于出厂状态,则不需要实施本步骤。)
【步骤 3】
伺服使能关闭(电机通电关闭)状态下,请向希望作为装置正方向的方向移动电机。
请确认此时的光栅尺计数方向,如果该方向为负方向,请设定为Pr0.00=0,如果为正方向,请设定为Pr0.00=1。设定后请写入 EEPROM,再次接通电源。
光栅尺计数方向可以根据前面监视器的光栅尺脉冲总和(参照 3-2-1 (6))或者 PANATERM 监视器画面“光栅尺脉冲总和”的值的变化方向进行确认。
电子齿轮比
向从上位控制器输入的位置指令中加入对象所设定电子齿轮比,并将此值作为位置控制部的 功能。通过使用此功能,可任意设定指定单位下的电机的旋转• 移动量。

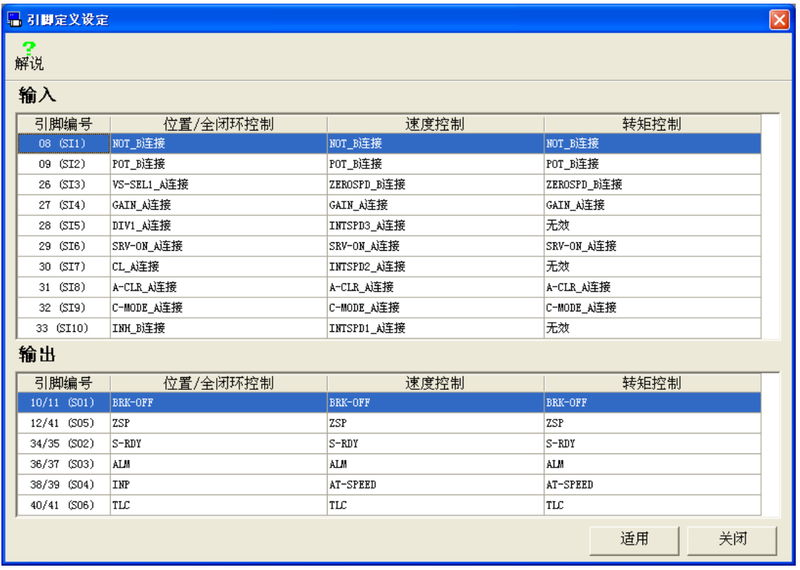
4、输出入信号分配
通过松下伺服调试软件PANATERM中引脚定义设定画面画面可以分配输入输出引脚的功能。
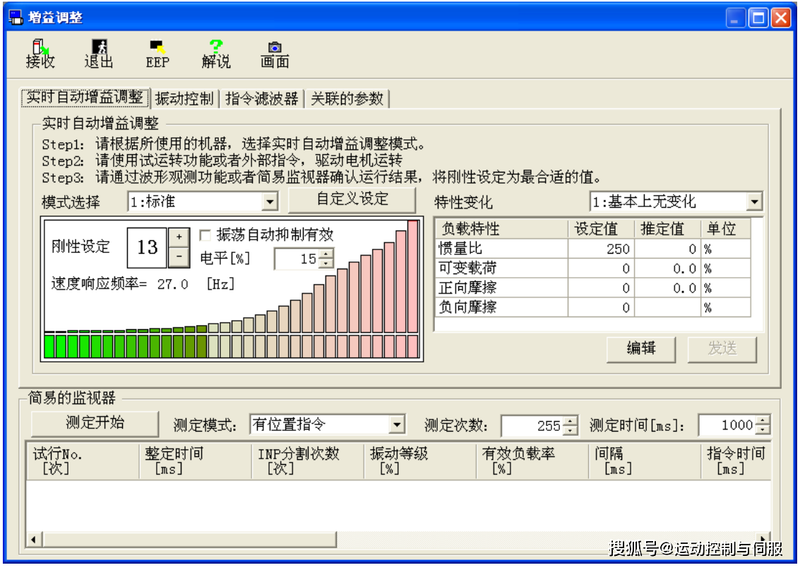
5、自动调整增益
可用增益调整来进行驱动器的自动调整。可使用简易监视器来作为调整指标进行自动测定。伺服增益调整方式与普通旋转伺服电机调整方法相同。